1. Adaptive reinforcement learning in control design for cooperating manipulator systems
Phuong Nam Daoa, Yen-Chen LiubIn this paper, an optimal motion/force hybrid control strategy based on adaptive reinforcement learning (ARL) is proposed for cooperating manipulator systems. The optimal trajectory control and constraint force factor control, by using the Moore–Penrose pseudoinverse, are addressed to design the controller corresponding to the manipulator dynamic model. In addition, a frame of a different auxiliary term and an appropriate state-variable vector are presented to address the non-autonomous closed system with a time-varying desired trajectory. The simultaneous actor/critic algorithm is implemented by optimizing the squared Bellman difference to be computed from the error of control policy and optimal control input. Moreover, the constraint force factor controller is discussed by a nonlinear technique after achieving the result of the constraint force factor. The tracking and convergence of ARL-based optimal motion/force hybrid control strategy are validated in closed-loop systems by a proposed Lyapunov function candidate. Finally, simulation results are implemented on a constrained system using three manipulators to verify the physical implementation of the presented optimal motion/force hybrid-tracking control strategy.
2. Uncoupled ductile fracture criterion considering secondary void band behaviors for failure prediction in sheet metal forming
Hung Quach a, Jin-Jae Kim a, Duc-Toan Nguyen b, Young-Suk Kim a
Abstract
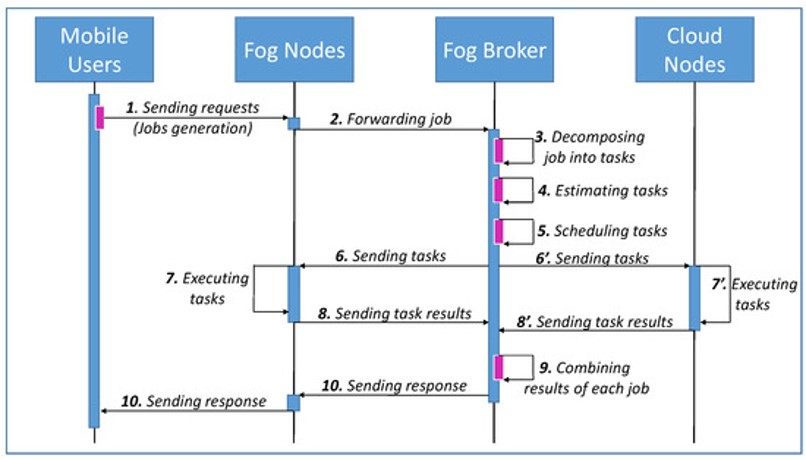
3. Detecting cyberattacks using anomaly detection in industrial control systems: A Federated Learning approach
Truong Thu Huong a, Ta Phuong Bac b, Dao Minh Long a, Tran Duc Luong a, Nguyen Minh Dan a, Le Anh Quang a, Le Thanh Cong a, Bui Doan Thang a, Kim Phuc Tran c
bSchool of Electronic Engineering, Soongsil University, Seoul, Korea cUniversité de Lille, ENSAIT, GEMTEX, F-59000 Lille, France
Abstract
In recent years, the rapid development and wide application of advanced technologies have profoundly impacted industrial manufacturing, leading to smart manufacturing (SM). However, the Industrial IoT (IIoT)-based manufacturing systems are now one of the top industries targeted by a variety of attacks. In this research, we propose detecting Cyberattacks in Industrial Control Systems using Anomaly Detection. An anomaly detection architecture for the IIoT-based SM is proposed to deploy one of the top most concerned networking technique - a Federated Learning architecture - that can detect anomalies for time series data typically running inside an industrial system. The architecture achieves higher detection performance compared to the current detection solution for time series data. It also shows the feasibility and efficiency to be deployed on top of edge computing hardware of an IIoT-based SM that can save 35% of bandwidth consumed in the transmission link between the edge and the cloud. At the expense, the architecture needs to trade off with the computing resource consumed at edge devices for implementing the detection task. However, findings in maximal CPU usage of 85% and average Memory usage of 37% make this architecture totally realizable in an IIoT-based SM.